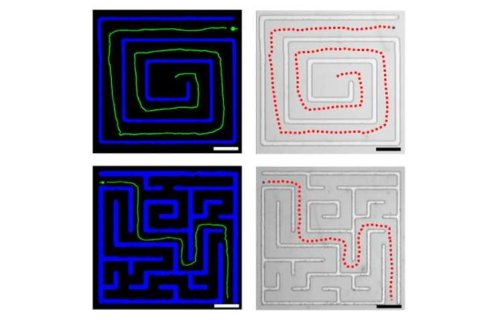

Группа исследователей, возглавляемая Лонгкью Ли (Longqiu Li) из Харбинского Технологического института (Harbin Institute of Technology), Китай, работая совместно с группой Джозефа Вона (Joseph Wang) из Калифорнийского университета в Сан-Диего (University of California San Diego), США, разработала микромасштабный вариант самоуправляемых транспортных средств. 5-микрометровые сферические микродвигатели, совершая короткие перемещения, могут самостоятельно пройти сквозь микролабиринт произвольной формы и достичь точки выхода из него. Исследователи считают, что у таких «умных микроскопических транспортных средств» имеется большое будущее в области биомедицины, где они смогут выполнять задачи по целевой доставке лекарственных препаратов, по борьбе с раковыми клетками и т.п.
«Мы подключили технологии искусственного интеллекта к микро- и нанороботам» — рассказывает Лонгкью Ли, — «Благодаря этому микроскопическое транспортное средство способно ориентироваться и маневрировать в условиях сложной и динамически изменяющейся окружающей среды. И, подобно своим полномасштабным коллегам, наши крошечные «автомобили-роботы» способны самостоятельно передвигаться, избегая столкновений с препятствиями и друг с другом».
До последнего времени для управления микро- и наномашинами использовались системы с обратными связями, при помощи которых эти машины могли передвигаться только строго по заранее заданному пути. Новая же система позволяет провести микромашину через среду, которая может кардинально измениться в любой момент времени и в которой могут появиться другие точно такие же микромашины.
Так же как и в других системах, в данной системе используется обратная связь в виде камеры, установленной на объектив микроскопа. Данные с этой камеры поступают на «процессор выявления признаков», который идентифицирует препятствия и изменения окружающей микромашину среды. Построенная карта поступает для дальнейшей обработки в программу-планировщик на базе искусственного интеллекта, которая при помощи алгоритмов поиска пути составляет перечень возможных путей передвижения микромашины. Затем при помощи методов нечеткой логики производится выбор оптимального и самого короткого пути, после чего генерируется последовательность команд управления генератором магнитного поля, под воздействием которого и движется микромашина.
Планировщик, который является основой «умной навигационной системы», способен обнаружить, когда микромашина под влиянием разных факторов, помех и шума, к примеру, начинает отклоняться от проложенного пути. В случае обнаружения отклонения производится вычисление его величины и вырабатывается ряд корректирующих значений, которые возвращают микромашину назад на заданный путь.
«В будущем мы планируем применить изобретенные нами принципы и технологии для создания микро- и наноробототехнических систем для биомедицины и для осуществления манипуляций наноразмерными объектами» — рассказывает Лонгкью Ли. Для реализации поставленных целей исследователи планируют разработать более сложные микромашины-роботы и более совершенную систему управления, которая позволит реализовать такие функции, как экстренное торможение, круиз-контроль, движение по определенной «полосе» и снабдить их возможностью оказывать воздействие на окружающую среду.