Ведутся технические работы. Это может временно повлиять на скорость работы сайта. Приносим извинения за неудобства и благодарим за ваше понимание!
Ведутся технические работы. Это может временно повлиять на скорость работы сайта. Приносим извинения за неудобства и благодарим за ваше понимание!

Крошечные роботы, обладающие мягким телом, могут успешно выполнять поставленные им задачи, действуя внутри биологических объектов, в том числе и человеческого тела. Несмотря на массу исследований в этом направлении, обеспечение возможности микророботов к самостоятельному и осмысленному передвижению так и остается труднореализуемой задачей, при решении которой разработчики сталкиваются с целым рядом проблем. Достаточно изящное решение данной проблемы удалось найти исследователям из университета Иллинойса, они создали микроробота, в конструкции которого использованы мускульные ткани и нейроны, и которые способны двигаться под воздействием падающего на них света.
Отметим, что ученые из Иллинойса работают в данном направлении уже достаточно давно, исследуя все возможные направления и варианты. В течение последних десяти лет ими было опубликовано множество работ, в которых по отдельности затрагивались темы использования мускульных тканей, нейронных нервных тканей и света, компонентов, которые в совокупности могут стать основой двигательной системы, позволяющей микророботам перемещаться или плавать совершенно самостоятельно.
«Наша первая «проба пера» была смоделирована на основе сперматозоида» — рассказывает профессор Тахер Сэйф (Taher Saif), — «Это первое поколение микророботов могло плавать достаточно быстро, используя «хвост», приводимый в действие клетками сердечной мышечной ткани, которые обладают способностью к сокращению. Однако, эти микророботы не могли реагировать на изменения окружающей среды и принимать самостоятельные решения».
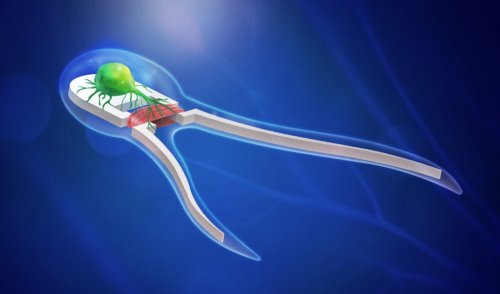
Продолжая работу в данном направлении, исследователи разработали новую конструкцию микроробота, у которого появилось два «хвоста» вместо одного. Основой является слоистая мягкая конструкция, связанная с мускульными тканями и моторными нейронами, которым была искусственно привита высокая чувствительность к свету. Отметим, что все упомянутые биоматериалы были выращены из стволовых клеток, взятых у подопытных грызунов. И самым примечательным является то, что вся конструкция микроробота является полностью биоразлагаемой, бактерии и другие микроорганизмы, живущие внутри биологического объекта, через некоторое время не оставят от него ни единого следа.
Когда на микроробота попадает свет с определенными параметрами, светочувствительные нейроны возбуждаются и «стреляют», заставляя сокращаться мускульные ткани, что двигает микроробота вперед. Варьируя параметры света можно в некоторой степени управлять возбуждением нейронов и воздействие, оказываемое ими на мускульные ткани. Таким образом можно заставить микроробота совершить поворот или изменить направление движения в вертикальной плоскости.
«Мы достигли достаточно важной вехи, продемонстрировав нейромускульный привод, заставляющий двигаться нашего микро-пловца» — пишут исследователи, — «Это, в свою очередь, открывает путь к развитию новых микроробототехнических биогибридных платформ, которые могут быть использованы в робототехнике, биоинженерии, медицине и во многих других областях».
| ( ! ) Warning: Invalid argument supplied for foreach() in /home/domains/malitikov.ru/public_html/wp-content/themes/malitikov/single.php on line 44 | ||||
|---|---|---|---|---|
| Call Stack | ||||
| # | Time | Memory | Function | Location |
| 1 | 0.0000 | 350600 | {main}( ) | .../index.php:0 |
| 2 | 0.0000 | 350880 | require( '/home/domains/malitikov.ru/public_html/wp-blog-header.php ) | .../index.php:17 |
| 3 | 0.0862 | 8490984 | require_once( '/home/domains/malitikov.ru/public_html/wp-includes/template-loader.php ) | .../wp-blog-header.php:19 |
| 4 | 0.0878 | 8515672 | include( '/home/domains/malitikov.ru/public_html/wp-content/themes/malitikov/single.php ) | .../template-loader.php:106 |