Ведутся технические работы. Это может временно повлиять на скорость работы сайта. Приносим извинения за неудобства и благодарим за ваше понимание!
Ведутся технические работы. Это может временно повлиять на скорость работы сайта. Приносим извинения за неудобства и благодарим за ваше понимание!
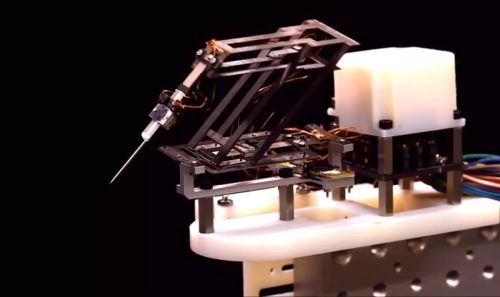

Специализированные роботы уже давно используются в хирургии, позволяя врачам проводить операции дистанционно и обеспечивая, при этом, высочайший уровень контроля и точности. Однако, практически все такие медицинские роботы являются сложнейшими машинами, весьма дорогостоящими и громоздкими, занимающими порой практически все доступное пространство возле операционного стола. И для того, чтобы сделать область хирургической робототехники более доступной для массового применения, исследователи из Гарвардского университета и корпорации Sony разработали миниатюрного робота, размер которого сопоставим с размером теннисного мяча, но который, тем не менее, обеспечивает высочайшую точность при проведении операций на микромасштабном уровне.
Основанием робота является металлическая платформа, на которой закреплена структура, изготовленная из композитного материала, обладающего высокой гибкостью. Эта структура-оригами, имеющая форму параллелограмма, может вращаться, перемещаться вверх и вниз, опускать и поднимать «манипулятор», на конце которого закреплен хирургический инструмент. А управляют всеми этими движениями всего три специальных высокоточных привода.
«Тело» этого хирургического робота было изготовлено при помощи самой современной технологии, в которой несколько слоев различных материалов были уложены друг поверх друга и подвергнуты процессу лазерной резки для придания всему этому необходимой формы. Крошечные высокоточные линейные приводы изготовлены из пьезоэлектрического керамического материала, который, искривляясь в ответ на подаваемые электрические сигналы, создает движение. А это движение, в свою очередь, контролируется оптическими датчиками.
Во время испытаний к роботу было подключенной устройство, которое можно назвать «трехмерным джойстиком», который оцифровывал движения руки человека и передавал роботу, который в точности их повторял. Человек, смотря в микроскоп, должен был провести наконечником инструмента по периметру квадрата, размер которого меньше размера шарика в наконечнике шариковой ручки. После этого робот выполнил данную операцию самостоятельно в автоматическом режиме. И в результате робот обеспечил точность, на 68 процентов превосходящую точность человека.
Вторым испытанием робота было моделирование операции по катетеризации ретинальной вены. В этой операции хирург вводит крошечный катетер в вену, находящуюся позади глазного яблока. В испытаниях были использованы силиконовые трубки, с соответствующим диаметром, приблизительно в толщину человеческого волоса и робот сумел сделать очень чистый прокол при помощи специальной иглы, не нанеся никакого побочного ущерба.
В пользу использования подобных устройств в медицине говорят те факты, что эти устройства достаточно недороги в производстве, их легко монтировать и демонтировать вручную, перемещать на другое место и т.п. А разработчики этого робота планирую продолжить свою работу, направленную на улучшение конструкции, увеличение силы и точности приводов, что позволит этому роботу использовать более тяжелые и большие по размерам инструменты, что, в свою очередь, значительно расширит его возможности.
| ( ! ) Warning: Invalid argument supplied for foreach() in /home/domains/malitikov.ru/public_html/wp-content/themes/malitikov/single.php on line 44 | ||||
|---|---|---|---|---|
| Call Stack | ||||
| # | Time | Memory | Function | Location |
| 1 | 0.0000 | 350920 | {main}( ) | .../index.php:0 |
| 2 | 0.0000 | 351200 | require( '/home/domains/malitikov.ru/public_html/wp-blog-header.php ) | .../index.php:17 |
| 3 | 0.1886 | 8497208 | require_once( '/home/domains/malitikov.ru/public_html/wp-includes/template-loader.php ) | .../wp-blog-header.php:19 |
| 4 | 0.1902 | 8521864 | include( '/home/domains/malitikov.ru/public_html/wp-content/themes/malitikov/single.php ) | .../template-loader.php:106 |